
For the past year I\’ve been working on a UAV called SLUGS (the Santa Cruz Low-cost UAV GNC System) in the Autonomous Systems Lab at UCSC. I\’m working with Mariano Lizarraga, and we are both being advised by Gabriel Elkaim.

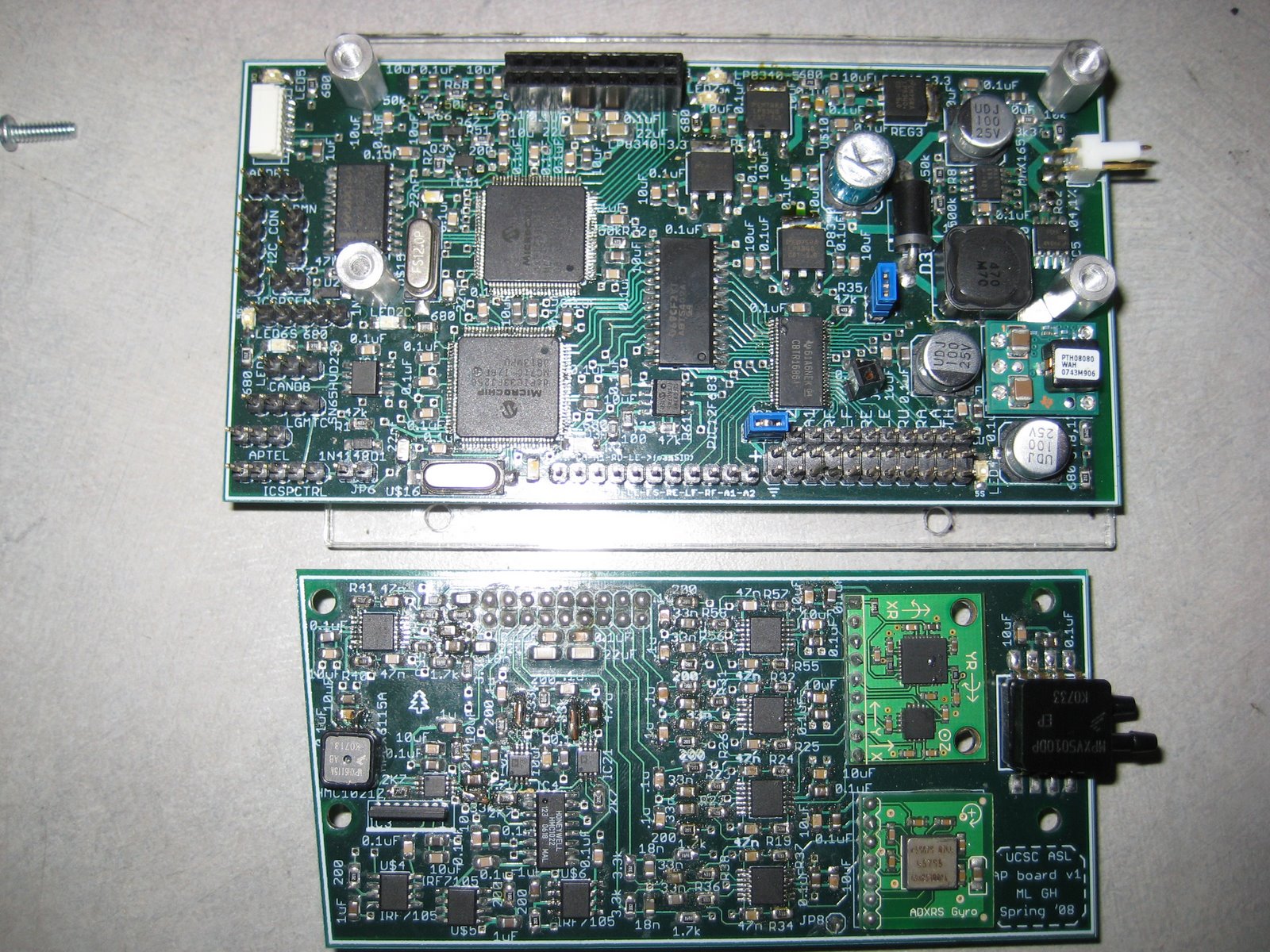
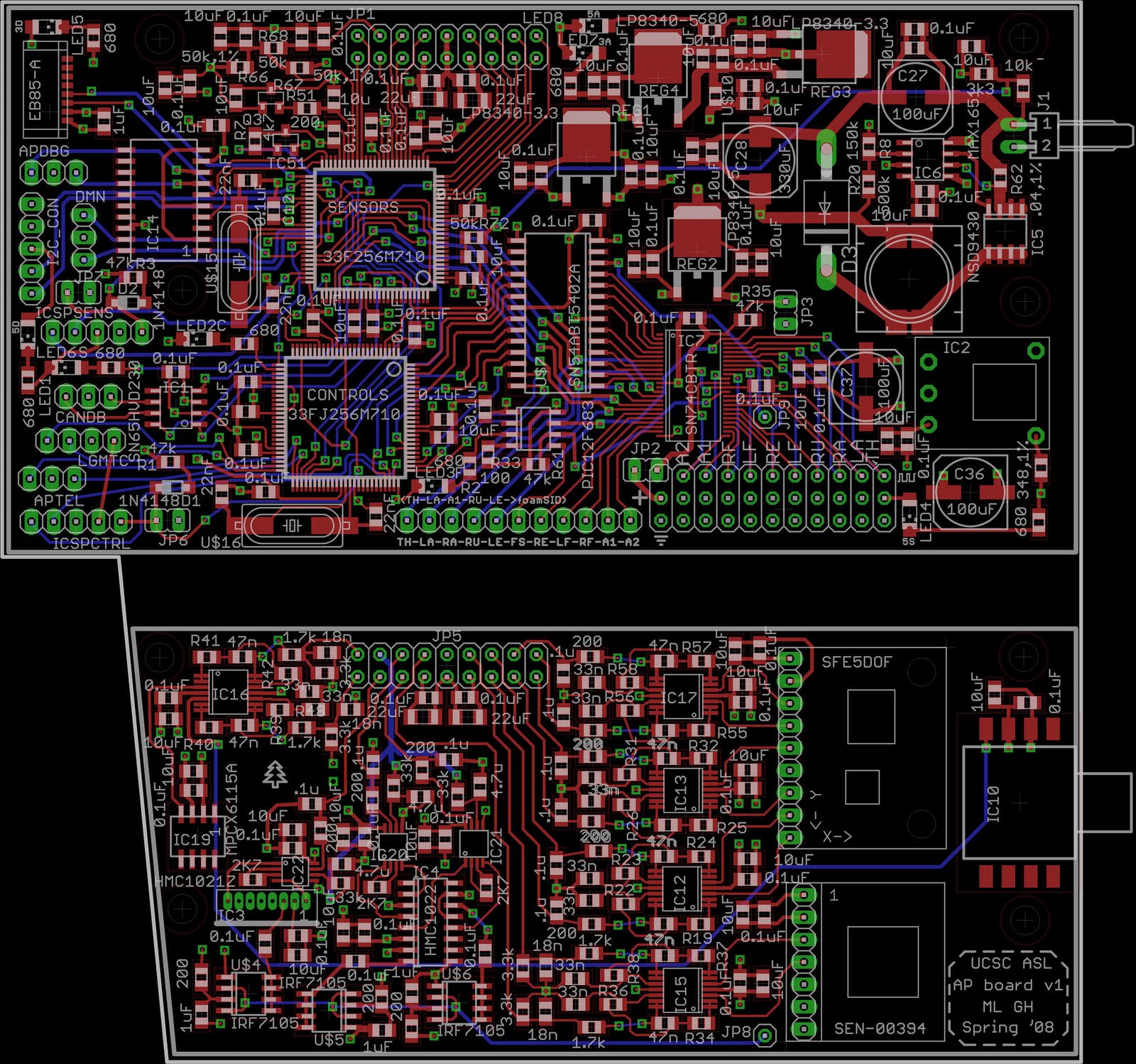
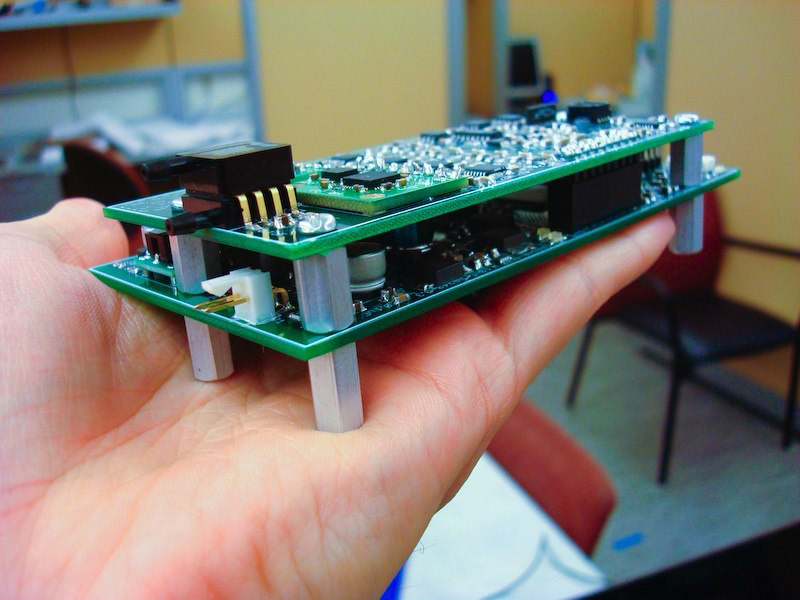
I designed an autopilot board:
 |
 |
 and my senior thesis was designing a Kalman filter for attitude estimation which could run at 100Hz embedded on the board:
and my senior thesis was designing a Kalman filter for attitude estimation which could run at 100Hz embedded on the board:
We\’ve flown the aircraft under pilot control and done post flight attitude estimation:
We had a crash:
 and we are currently working on a second generation autopilot board.
and we are currently working on a second generation autopilot board.
